零次方科技近期震撼发布了其首款代号为Z1的人形机器人,标志着该公司在机器人技术领域迈出了重要一步。这款机器人不仅能在复杂多变的地形中稳定行走,还具备出色的抗干扰能力,即使面临来自各个方向的强烈冲击,也能保持屹立不倒。
在发布的视频中,Z1展示了其惊人的学习能力。通过观察人类的行为动作,它能够模仿并学习攻击招式,利用全身协同控制能力进行动态防御。视频中,两台Z1机器人上演了一场精彩绝伦的机器人格斗比赛,攻击、躲避、平衡,每一个动作都显得那么流畅自然。
作为零次方科技的首款双足人形机器人,Z1配备了最高可达150Nm的关节电机,全身拥有27个自由度,载重测试极限高达20kg,负载与自重比超过70%。Z1还搭载了自研的EtherCAT通讯模组,实现了低延时高带宽的整体系统性能。在设计之初,零次方团队就采用了AI技术辅助进行机器人的结构参数设计,从而实现了更低的能耗和更高的动态运动性能。结合自研的物理交互世界模型算法,Z1能够应对各种复杂工况和地形,展现出卓越的行走能力。
在视频中,Z1还展示了与电影《钢甲铁拳》中相似的场景,完美复刻了人类的双臂动作,令人叹为观止。零次方团队表示,他们计划在今年年底举办一场无机器人操作设备参与的人形机器人拳击比赛,让每个人都能感受到机甲的魅力。这项技术正是零次方团队在之前发布的双臂机器人F1上所展示的,其核心算法之一便是基于人类视频数据学习。
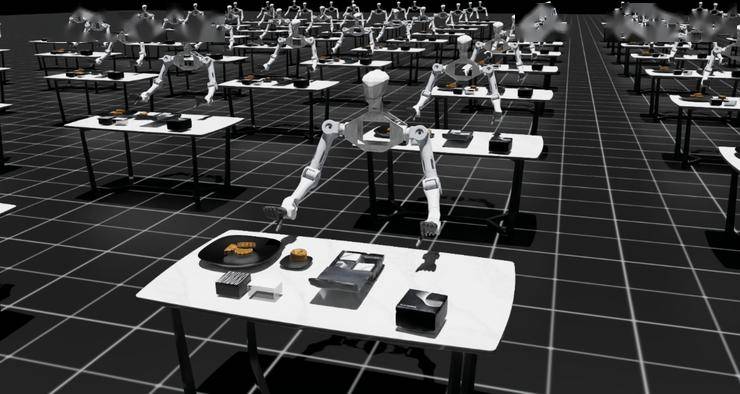
零次方团队认为,数据量是实现通用具身操作的关键因素,而单位数据成本则是产品落地的基础条件。他们借鉴了大语言模型和特斯拉自动驾驶的Scaling Law,认为实现具身智能的路径无论是基于多模态大模型、构建高维世界模型还是组合专有领域小模型,都离不开海量的优质数据。当前,机器人所需的数据分为三层:真实的遥操数据、高质量的仿真合成数据以及人类行为数据。其中,人类行为数据虽然质量相对较低,但数量庞大,因此如何利用这些海量的人类视频数据成为了零次方团队的主要研究方向。

零次方科技致力于通过三维人体运动姿态感知模型提取人类关键关节的运动数据,并将其重映射到机器人身上。他们采用4D高斯溅射技术重建机器人所需观测信息,最终利用Transformer-Based Diffusion Policy驱动机器人自主完成任务,使其具备直接向人类学习的能力。这种基于向人类学习的方式(LFWH)使得机器人能够构建基础模型,并在仿真训练中进行强化学习,实现更加灵活泛化的操作。
零次方科技由清华大学和江淮前沿技术协同创新中心共同孵化,团队主创成员来自清华大学AI&Robot智能机器人实验室,在机器人操作及运动控制领域有着深厚的学术背景。团队成员还包括来自字节跳动、百度等互联网大厂以及协作机器人公司的专业人士,他们在将创新技术转化为商业落地产品方面具有丰富的经验。零次方团队成立于2024年5月,仅用短短4个月的时间就完成了两款人形机器人产品的开发,展现了其强大的创新能力和执行力。

零次方科技的目标是让机器人能够走进千家万户,提高人们生产生活的效率。他们针对中小企业工厂改造难、手动编程等问题,提出了用机器人自主学习实现原位替代的解决方案。通过完全仿人的设计,机器人能够替换对应的功能,无需改变布局和编程,即可实现快速部署。这种持续学习的能力使得机器人在场景方面的泛化能力不断增强,为制造业产业升级和中小企业降本增效提供了有力支持。